



Около 70% от изхвърлените във водите отпадъци потъват на дъното на океаните и моретата или се разлагат на милиони тонове микро- и нанопластмаса. Въз основа на базирана на изкуствен интелект система, изследователският проект MAELSTROM представи иновативна разработка на автономен робот за водни басейни с дълбочина на потапяне до 20 m, който избирателно идентифицира и събира обекти. Решението е автоматизирано с помощта на компютърно-базирано управление на Beckhoff и успешно е преминало системни тестове в каналите на Венеция през септември 2022 г.
„Ако искаме да предотвратим замърсяването на водните екосистеми или навлизането на микро- и нанопластмаси в телата ни чрез хранителните вериги, освен че е важно да спрем по-нататъшното замърсяване на водите, трябва и да се погрижим за боклука, който вече е попаднал под повърхността на водата. Точно това има за цел и проектът MAELSTROM на European Horizon 2020 – да разработи и интегрира технологии за идентифициране, отстраняване, сортиране и трансформиране в суровини на всякакви отпадъци от дебрите на моретата и океаните“, поясниха за ДигиталнаИндустрия.bg от водещото българско инженерингово дружество Кастива, официален представител на Beckhoff за България.

Международният изследователски екип на проекта разработва роботизирана платформа за почистване на морското дъно. Нейната основна част е подводен робот, оборудван със захващащо и засмукващо устройство, което се движи гъвкаво в шест направления с помощта на осем лебедки. Използвайки специални сензори и камери, роботът засича боклука по морското дъно и автоматично се позиционира над него. Той може да повдига предмети с тегло до 130 kg, включително велосипеди, гуми, кутии, оградни мрежи и др., докато по-малките частици замърсявания или пластмасови отпадъци, плаващи във водата, се прихващат чрез засмукване. Вендузите и захващащият механизъм се активират само когато е необходимо, свеждайки до минимум въздействието върху морската екосистема.
„За да осигурят стабилно, точно и бързо позициониране, за управлението на позициониращите лебедки са избрани безчеткови синхронни сервомотори AM8071 и серво задвижвания AX5118 от Beckhoff. Технологията One Cable на задвижванията намалява усилията за окабеляване и изискванията за пространство при лебедките. Здравите стоманени кабели на лебедките позволяват корпуса на робота да бъде прецизно позициониран под водата и придържан с изключително голяма стабилност, въпреки понякога силните течения“, разказаха от Кастива.
Сензори и свързващи технологии
За контрола и мониторинга на подводния „робот-чистач“ са използвани множество сензори и камери за ръчно, автоматично и дистанционно управление. Интегриран сензор за налягане отчита дълбочината на гмуркане, а инерционно измервателно устройство регулира позицията на робота във водата. Разстоянието на мобилната платформа до морското дъно и нейната относителна скорост се записват от специално устройство чрез четири сонарни сензора.
Част от останалите сензори на системата са разположени на понтона върху самата водна повърхност, включително сензор за налягане, чрез показанията на който се компенсират промените в атмосферното налягане по време на гмуркането. Две кинематични GPS единици в реално време определят позицията и вертикалната ориентация на платформата. Всички данни от тези различни системи се вземат под внимание при управлението и регулирането на позицията на робота.
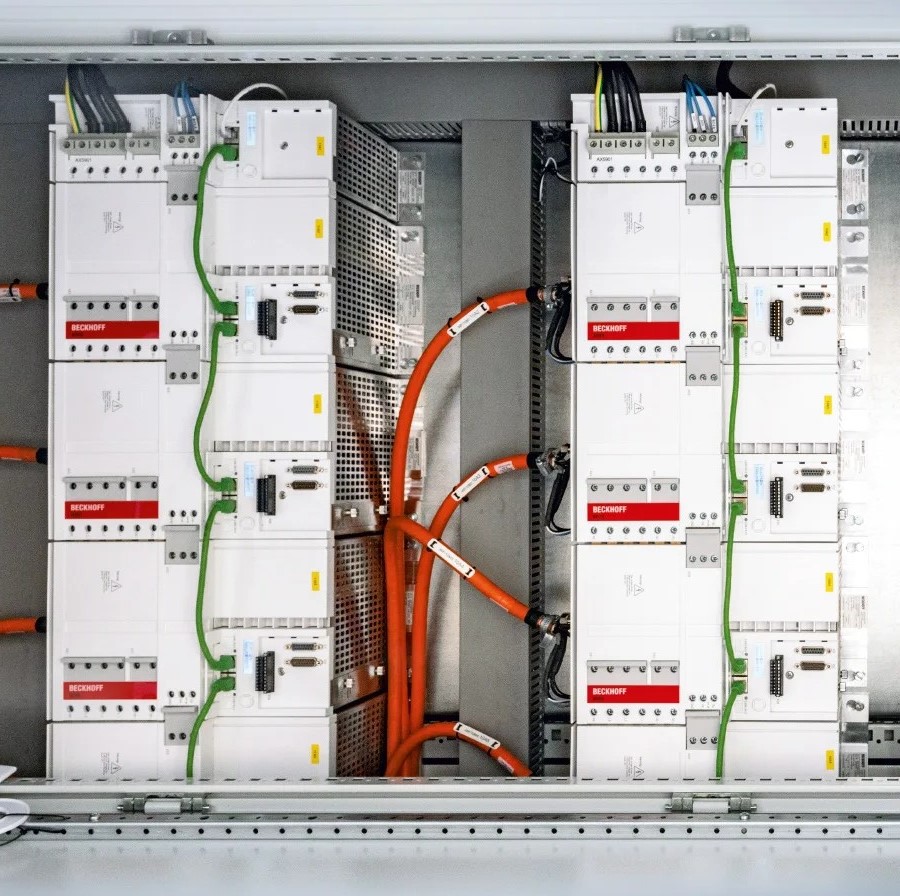
„Със своите общо дванадесет оси – осем лебедки и четири вертикални плъзгачи на понтонните мачти – подводният робот се управлява от TwinCAT 3, инсталиран на индустриален компютър с контролен шкаф C6650 на Beckhoff. Контролерът е монтиран в главния контролен шкаф, разположен в контролна зала. Технологията за безопасност се изпълнява от EtherCAT терминал EL6910 и софтуерът TwinSAFE“, коментираха специалистите от българската фирма. „Други четири разпределителни кутии, монтирани децентрализирано на кабелните лебедки, съдържат входно-изходните интерфейсни модули и електрониката за измерване на силата на кабела. Връзката между контролния шкаф и разпределителните кутии се осъществява посредством Ethercat P. Според реализаторите на проекта това приложение на технологията EtherCAT прави възможно предаването както на постояннотоковото захранване, така и на EtherCAT комуникацията в реално време само чрез един кабел“, уточниха още те.
Управление на роботизираната платформа
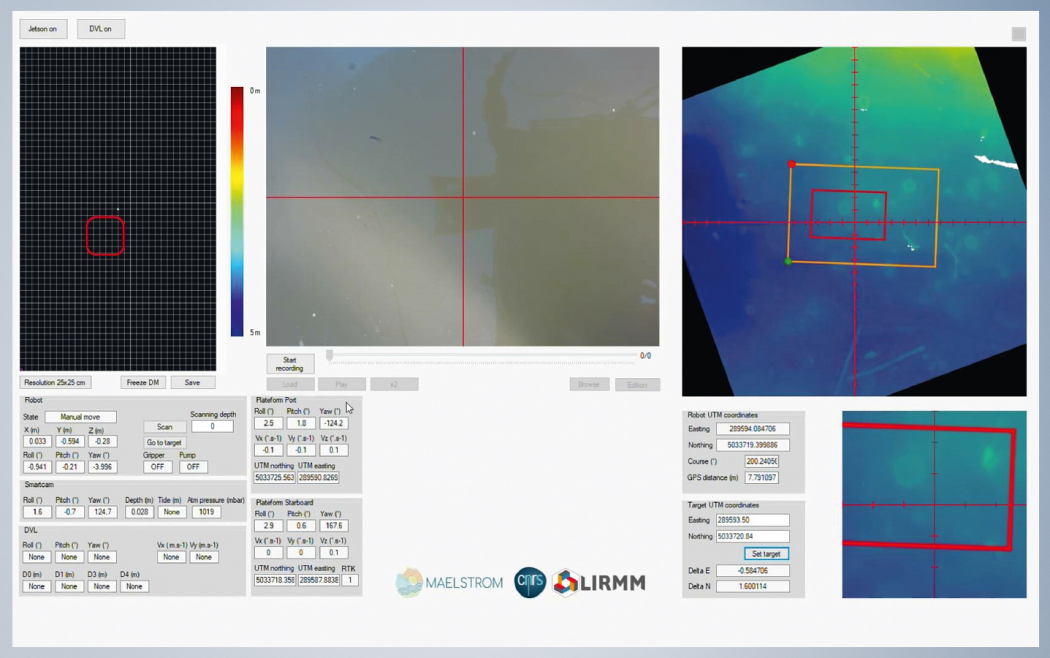
Управлението на робота се осъществява посредством джойстик. Операторът използва прогнозната позиция на мобилната подводна платформа и камерите, разположени на нея. С помощта на човеко-машинен интерфейс (HMI), операторът може да избира различни режими на управление и да наблюдава всички функции въз основа на стойностите на сензора – в допълнение към визуалния контрол от подводните камери.
Системата за подводно възприятие дава възможност за визуално серво управление. Веднага щом операторът забележи отпадък по дъното (на сравнително малко разстояние от камерата поради мътността на водата), той може да кликне върху него на изображението и мобилната платформа автоматично ще се приближи към боклука. „В допълнение към ръчното управление, роботът може и автономно да идентифицира, да се насочва и да събира боклуците. Това работи на базата на изкуствен интелект, който е в състояние да идентифицира морските отпадъци и да избере най-подходящото устройство за тяхното отстраняване“, допълниха още от Кастива.

Повече информация за Кастива ООД, марките, продуктите и услугите, които предлага у нас, реализации и актуални промоционални кампании, бихте могли да намерите в микросайта на фирмата в Борса.bg! Разберете още кои са активните постоянни и стажантски позиции на компанията, както и подробности за технологичните възможности и бъдещите ѝ планове за развитие от ТУК!

Източник на снимковия материал: Кастива, Beckhoff, maelstrom-h2020.eu, freepik.com
-
STAMH: Максимална плътност на съхранение в хладилни складове? Научете как с 360° обиколка в дистрибуционния център на Булкарто 18.12.2024 г.
-
БИБУС България: Новата серия ATEX 0342/0343 на SUCO включва два вида взривобезопасни релета за налягане с огнеупорен корпус 18.12.2024 г.
-
Регина Симон, търговски директор на Бош „Електроинструменти“: Огромно щастие е да попаднеш в компания като Bosch 17.12.2024 г.
-
Агрополихим: Придобиването на ключов дял от Неохим е смела стъпка към разширяването и диверсификацията на дейността ни 18.12.2024 г.
-
Filkab Solar: Zgjidhja Sunny Home Manager 2.0 e SMA optimizon konsumin e energjisë elektrike PV 18.12.2024 г.
-
Kompania logjistike Nelt Group po investon 100 milionë euro në bazat e saj në Serbi dhe rajon 18.12.2024 г.
-
Maqedonia e Veriut ka shpallur tenderin për ndërtimin e 30 MW termocentrale diellore 17.12.2024 г.
-
Shqipëria nis një projekt në shkallë të gjerë të mbikëqyrjes së rrugëve me ndihmën e Emirateve të Bashkuara Arabe 16.12.2024 г.
-
Унисист Инженеринг со коментар за регулаторната рамка за изградба на паметни системи за мерење 18.12.2024 г.
-
Логистичката компанија Nelt Group инвестира 100 милиони евра во своите бази во Србија и регионот 18.12.2024 г.
-
МаккаБ, дел од групацијата на Филкаб, отвори голема магацинска и административна база во Скопје 18.12.2024 г.
-
Котелска инсталација од Hoval обезбедува удобно греење во амблематичната Дунавска кула во Виена 17.12.2024 г.
-
Compania de logistica Nelt Group investeste 100 de milioane de euro in bazele sale din Serbia si regiune 18.12.2024 г.
-
Macedonia de Nord a lansat o licitatie pentru construirea unor centrale electrice solare cu capacitate de 30 MW 17.12.2024 г.
-
Unisyst Engineering cu un comentariu cu privire la cadrul de reglementare pentru construirea sistemelor inteligente de contoriza 16.12.2024 г.
-
Albania lanseaza un proiect la scara larga de supraveghere stradala cu ajutorul EAU 16.12.2024 г.
-
Логистичка компанија Nelt Group улаже 100 милиона евра у своје погоне у Србији и региону 18.12.2024 г.
-
Два струга са роботом и РАИС палетна станица омогућавају прецизну обраду делова различитих величина и дужина 18.12.2024 г.
-
Филкаб Солар: Sunny Home Manager 2.0 компаније SMA оптимизује потрошњу електричне енергије PV 17.12.2024 г.
-
Северна Македонија расписала је тендер за изградњу соларних електрана од 30 MW 17.12.2024 г.
-
Valkrea.House: Езеро, скрит басейн и домашно кино, управлявани от KNX, са част от иновациите в дом на бъдещето в Белгия
02 декември 2024 г.
-
Вайд-Бул: От своя ден първи Eltako мисли за бъдещето и създава иновативни решения за сградна автоматизация
26 ноември 2024 г.
-
GreMa 3D: Скенерите KSCAN Magic на Scantech „чертаят“ бъдещето на метрологията и намират все по-модерни приложения
18 ноември 2024 г.